ROS
当先所有代码的git仓库 https://gitee.com/tianxiaohuahua/upper_computer_rviz
一、基础
1.创建工作空间 catkin_ws
创建src文件,放置功能包源码:
mkdir -p ~/catkin_ws/src
进入src文件夹:
cd ~/catkin_ws/src
初始化文件夹:
catkin_init_workspace
这样就在src文件中创建了一个 CMakeLists.txt 的文件,目的是告诉系统,这个是ROS的工作空间。
2.编译工作空间 catkin_make
所有编译工作都要在catkin_ws文件夹下编译:
cd ~/catkin_ws/
编译,编译完成后,会发现catkin_ws中多了两个文件 build 和 devel
catkin_make
3.设置环境变量
在第1篇中,我们介绍了设置环境变量,那个是将整个ros系统的环境变量设置到bash脚本中,现在我们需要把我们工作空间的环境变量设置到bash中。
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
让上面的配置在当前的终端生效:
source ~/.bashrc
我们用 vi 编辑器打开 ~/.bashrc 文件,就可以看到最后两行,第一行是我们第1篇添加的ros系统的环境变量,第2行是我们创建的catkin_ws工作空间的环境变量:

如果想要查看环境变量:
echo $ROS_PACKAGE_PATH
终端会输出:
/home/wdd/catkin_ws/src : /opt/ros/kinetic/share 第一个是我们刚才创建的catkin_ws的,第二个是ros系统的。
4.创建功能包
在src中创建:
cd ~/catkin_ws/src/
功能包格式:
catkin_create_pkg package_name depend1 depend2 depend2
package_name:功能表名称
depend1、2、3:依赖项
创建功能包:
catkin_create_pkg learning_communication std_msgs roscpp rospy
std_msgs:包含常见消息类型
roscpp:使用C++实现ROS各种功能
rospy:使用python实现ROS各种功能
5.编译功能包
cd ~/catkin_ws
catkin_make
显示如下说明编译成功:

6.添加编译C++源文件
ROS入门教程(三)—— 用C++或Python实现Hello world_ros操作系统下算法是用什么语言写的-CSDN博客
来到新建的learning_communication功能包
cd catkin_ws/src/learning_communication/src/
mkdir learning_communication_node.cpp
打开源文件添加如下内容:
#include "ros/ros.h" //set ros include
int main(int argc, char *argv[]) // main funtion
{
//init ros includes
ros::init(argc,argv,"haha");
//print hello world
ROS_INFO("hello world!");
return 0;
}
7.修改节点Cmake文件
打开 catkin_ws/src/learning_communication 下面的cmakeList.txt
8. 编译测试:
回到catkin_ws 工作目录下面进行编译:
ros">catkin_make
9.运行程序
重新打开一个输入:【启动ros核心】
roscore
再重新打开另一个终端输入:【在工作空间中编译并执行】
source ./devel/setup.bash
rosrun helloworld hello
二、绘图
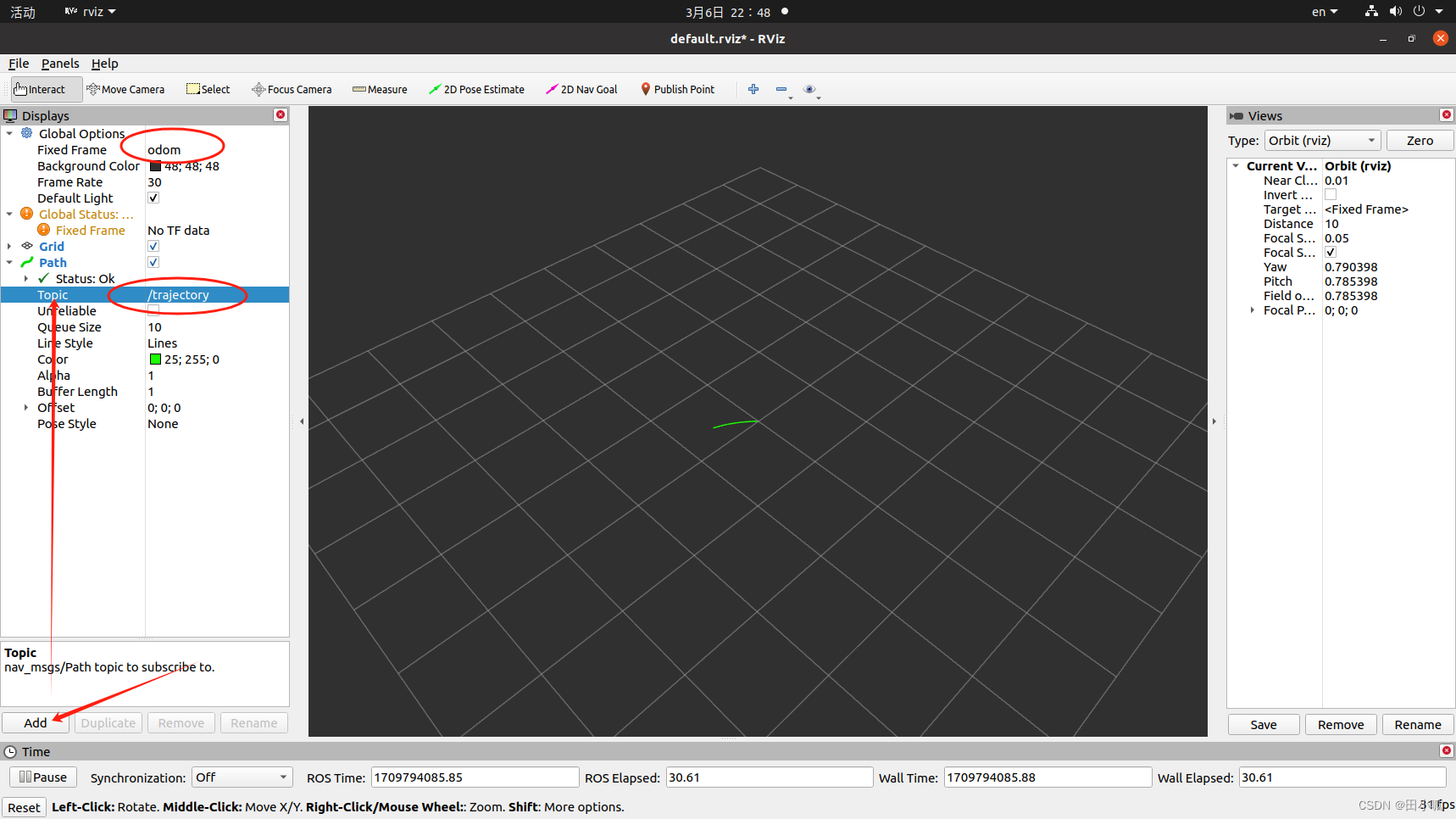
1、添加odom
ROS中rviz显示运动轨迹的常见方法_visualization_msgs::msg::marker 绘制轨迹-CSDN博客
新建功能包和源文件:
catkin_create_pkg learning_communication std_msgs roscpp rospy
cd catkin_ws/src/learning_communication/src/
mkdir learning_communication_node.cpp
添加源文件 learning_communication_node.cpp
#include <ros/ros.h>
#include <ros/console.h>
#include <nav_msgs/Path.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Quaternion.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
main (int argc, char **argv)
{
ros::init (argc, argv, "showpath");
ros::NodeHandle ph;
ros::Publisher path_pub = ph.advertise<nav_msgs::Path>("trajectory",1, true);
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
nav_msgs::Path path;
//nav_msgs::Path path;
path.header.stamp=current_time;
path.header.frame_id="odom";
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.1;
double vy = -0.1;
double vth = 0.1;
ros::Rate loop_rate(1);
while (ros::ok())
{
current_time = ros::Time::now();
//compute odometry in a typical way given the velocities of the robot
double dt = 0.1;
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = x;
this_pose_stamped.pose.position.y = y;
geometry_msgs::Quaternion goal_quat = tf::createQuaternionMsgFromYaw(th);
this_pose_stamped.pose.orientation.x = goal_quat.x;
this_pose_stamped.pose.orientation.y = goal_quat.y;
this_pose_stamped.pose.orientation.z = goal_quat.z;
this_pose_stamped.pose.orientation.w = goal_quat.w;
this_pose_stamped.header.stamp=current_time;
this_pose_stamped.header.frame_id="odom";
path.poses.push_back(this_pose_stamped);
path_pub.publish(path);
ros::spinOnce(); // check for incoming messages
last_time = current_time;
loop_rate.sleep();
}
return 0;
}
修改Cmake进行编译:
cd catkin_ws/
catkin_make
运行:
source ./setup.base
rosrun learning_communication learning_communication_node
运行rviz
rviz
2、添加tf
ROS中的TF坐标变换工具及实现、Rviz查看(十四)C++、python_rviz查看某点的坐标-CSDN博客
新建一个功能包:
cd catkin_workSpease/src
catkin_create_pkg tf_test roscpp rospy std_msgs tf2 tf2_ros tf2_geometry_msgs geometry_msgs
catkin_init_workspace
新建源文件
touch tf_test_node.cpp
/*
静态坐标变换发布方:
发布关于 laser 坐标系的位置信息
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建静态坐标转换广播器
4.创建坐标系信息
5.广播器发布坐标系信息
6.spin()
*/
// 1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"static_brocast");
// 3.创建静态坐标转换广播器
tf2_ros::StaticTransformBroadcaster broadcaster;
// 4.创建坐标系信息
geometry_msgs::TransformStamped ts;
//----设置头信息
ts.header.seq = 100;
ts.header.stamp = ros::Time::now();
ts.header.frame_id = "base_link";
//----设置子级坐标系
ts.child_frame_id = "laser";
//----设置子级相对于父级的偏移量
ts.transform.translation.x = 0.2;
ts.transform.translation.y = 0.0;
ts.transform.translation.z = 0.5;
//----设置四元数:将 欧拉角数据转换成四元数
tf2::Quaternion qtn;//创建四元数对象
qtn.setRPY(0,0,0);//向该对象设置欧拉角,这个对象可以将欧拉角转换成四元数
//注意此处是弧度值,比如说设置3.14就是绕着对应轴转了一圈
ts.transform.rotation.x = qtn.getX();
ts.transform.rotation.y = qtn.getY();
ts.transform.rotation.z = qtn.getZ();
ts.transform.rotation.w = qtn.getW();
// 5.广播器发布坐标系信息
broadcaster.sendTransform(ts);
ros::spin();
return 0;
}
修改Cmake
add_executable(${PROJECT_NAME}_node src/tf_test_node.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
编译测试:
cd catkin_wprkspase
catkin_make
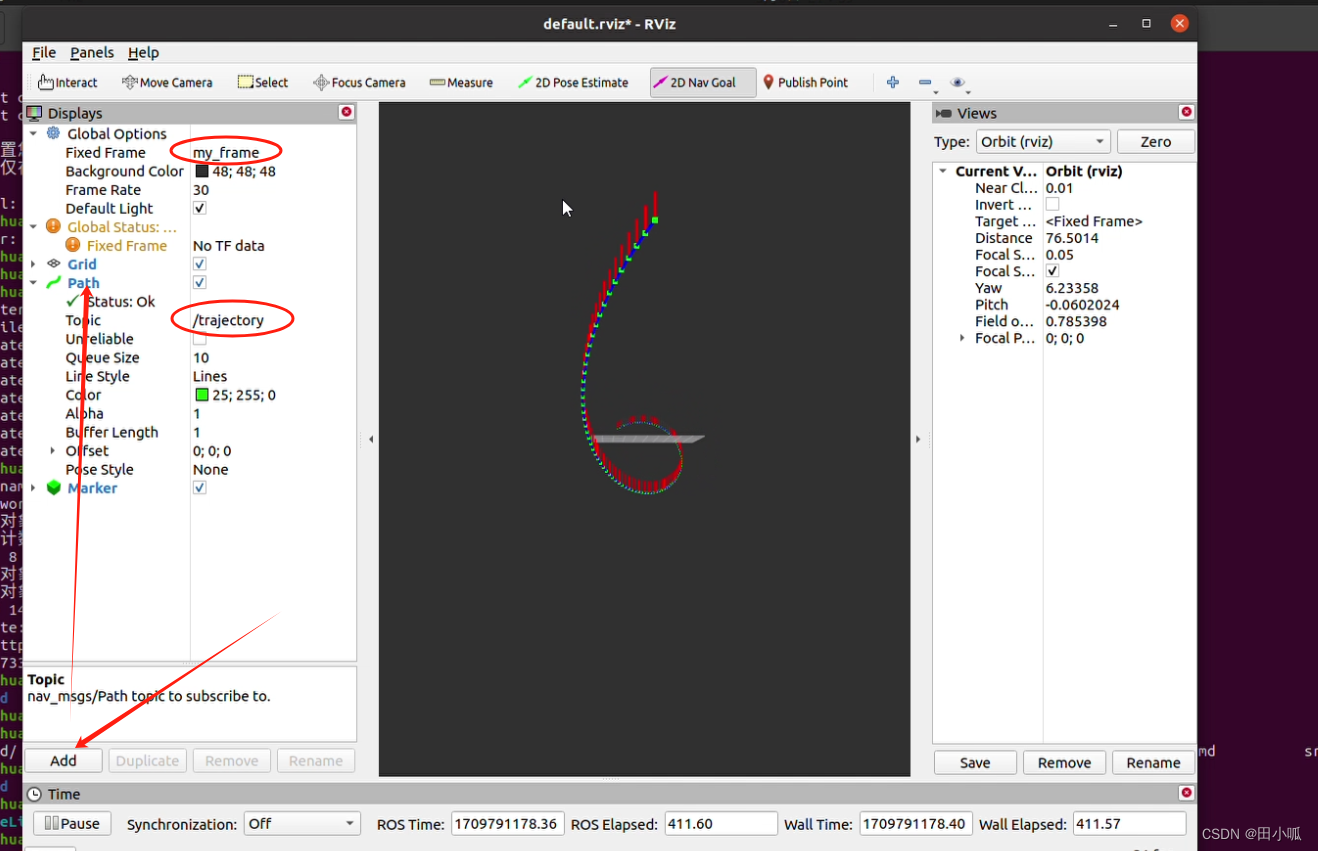
3、散点绘制直线
如何由一组散点绘制直线,曲线或轨迹并在Rviz中显示
如何由一组散点绘制直线,曲线或轨迹并在Rviz中显示_rviz画直线-CSDN博客
新建一个功能包:
cd catkin_workSpease/src
catkin_create_pkg tf_test roscpp rospy std_msgs tf2 tf2_ros tf2_geometry_msgs geometry_msgs
catkin_init_workspace
新建源文件
touch using_markers_node.cpp
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
#include <cmath>
int main( int argc, char** argv )
{
ros::init(argc, argv, "points_and_lines");
ros::NodeHandle n;
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 10);
ros::Rate r(30);
float f = 0.0;
while (ros::ok())
{
visualization_msgs::Marker points, line_strip, line_list;
points.header.frame_id = line_strip.header.frame_id = line_list.header.frame_id = "my_frame";
points.header.stamp = line_strip.header.stamp = line_list.header.stamp = ros::Time::now();
points.ns = line_strip.ns = line_list.ns = "points_and_lines";
points.action = line_strip.action = line_list.action = visualization_msgs::Marker::ADD;
points.pose.orientation.w = line_strip.pose.orientation.w = line_list.pose.orientation.w = 1.0;
points.id = 0;
line_strip.id = 1;
line_list.id = 2;
points.type = visualization_msgs::Marker::POINTS;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
line_list.type = visualization_msgs::Marker::LINE_LIST;
// POINTS markers use x and y scale for width/height respectively
points.scale.x = 0.2;
points.scale.y = 0.2;
// LINE_STRIP/LINE_LIST markers use only the x component of scale, for the line width
line_strip.scale.x = 0.1;
line_list.scale.x = 0.1;
// Points are green
points.color.g = 1.0f;
points.color.a = 1.0;
// Line strip is blue
line_strip.color.b = 1.0;
line_strip.color.a = 1.0;
// Line list is red
line_list.color.r = 1.0;
line_list.color.a = 1.0;
// Create the vertices for the points and lines
for (uint32_t i = 0; i < 100; ++i)
{
float y = 5 * sin(f + i / 100.0f * 2 * M_PI);
float z = 5 * cos(f + i / 100.0f * 2 * M_PI);
geometry_msgs::Point p;
p.x = (int32_t)i - 50;
p.y = y;
p.z = z;
points.points.push_back(p);
line_strip.points.push_back(p);
// The line list needs two points for each line
line_list.points.push_back(p);
p.z += 1.0;
line_list.points.push_back(p);
}
marker_pub.publish(points);
marker_pub.publish(line_strip);
marker_pub.publish(line_list);
r.sleep();
f += 0.04;
}
}
修改Cmake
add_executable(${PROJECT_NAME}_node src/using_markers_node.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
编译测试:
cd catkin_wprkspase
catkin_make
ROS2 操作
ROS2 入门应用 工作空间 - 古月居 (guyuehome.com)
在Ubuntu 20.04中安装ROS2最新版本Foxy Fitzroy_ubuntu 20.04 sudo apt install gazebo_ros_pkgs ros2-CSDN博客
source /opt/ros/foxy/setup.bash
以后每次打开终端都需要输入一次上面的语句,比较麻烦。我们以zsh为例,解决方法:
$ echo "source /opt/ros/foxy/setup.zsh" >> ~/.zshrc
$ source ~/.zshrc
这样,以后每次新打开终端,就不需要输入这条烦人的语句了source /opt/ros/foxy/setup.zsh, 终端会自动帮你加载这条语句,设置好ROS2的环境变量。
(2)安装argcomplete(可选)
sudo apt install python3-argcomplete
(3)安装RMW implementation
sudo apt update
sudo apt install ros-foxy-rmw-connext-cpp